Best Micro Linear Actuators for Robotics: A Comprehensive Guide
The world of robotics is constantly evolving, demanding ever-smaller, more powerful, and precise components. Micro linear actuators have emerged as crucial elements in this advancement, enabling intricate movements and functionalities in a compact form factor. Their versatility extends across diverse applications, from surgical robots to micro-assembly systems. This in-depth exploration delves into the best micro linear actuators currently available, comparing their capabilities, features, and suitability for various robotic applications. We’ll consider factors like force output, stroke length, speed, and power consumption to help you make informed decisions;
Understanding Micro Linear Actuators: A Foundation
Micro linear actuators are electromechanical devices that convert electrical energy into linear motion. Unlike larger actuators, their miniature size allows for integration into compact robotic systems, where space is at a premium. They typically operate through various mechanisms, including piezoelectric, electromagnetic, or shape memory alloy technologies, each offering distinct advantages and limitations. Understanding these mechanisms is key to selecting the optimal actuator for a given robotic application.
Key Parameters for Selection
- Force Output: Measured in Newtons (N), this indicates the maximum force the actuator can generate.
- Stroke Length: The maximum distance the actuator can travel in a single movement.
- Speed: Expressed as millimeters per second (mm/s) or similar units, it signifies the actuator’s rate of movement.
- Power Consumption: A crucial factor, especially for battery-powered robots, reflecting efficiency and operational time.
- Durability and Reliability: Essential for long-term performance in demanding environments;
- Precision and Controllability: The ability to achieve precise and repeatable movements is crucial for many applications.
Top Micro Linear Actuator Technologies
Several technologies underpin the functionality of micro linear actuators, each with its own set of strengths and weaknesses. The choice often depends on the specific requirements of the robotic system.
Piezoelectric Actuators: Precision and Speed
Piezoelectric actuators utilize the piezoelectric effect – the ability of certain materials to change shape when an electric field is applied. These actuators offer exceptional precision and rapid response times, making them ideal for applications requiring fine control and high speed. However, they typically generate relatively low forces and have a limited stroke length compared to other technologies.
Electromagnetic Actuators: Versatility and Force
Electromagnetic actuators leverage the principles of electromagnetism to generate linear motion. These actuators are more versatile than piezoelectric counterparts, capable of generating higher forces and longer strokes. However, they may not offer the same level of precision and speed as piezoelectric actuators. Various designs exist, including linear solenoids and voice coil actuators, each with specific performance characteristics.
Shape Memory Alloy (SMA) Actuators: Compactness and Simplicity
Shape memory alloys exhibit the unique property of “remembering” their original shape after deformation. By heating these alloys electrically, they can be made to contract or expand, providing a simple and compact linear actuation mechanism. SMA actuators are known for their silent operation and high power-to-weight ratio but are often slower and less precise than other types.
Applications in Robotics
The diverse capabilities of micro linear actuators make them indispensable components in a wide array of robotic systems. Their compact size and precision control are particularly valuable in applications where space and accuracy are critical.
Surgical Robotics: Precision and Minimally Invasive Procedures
Micro linear actuators are integral to surgical robots, enabling precise manipulation of surgical instruments during minimally invasive procedures. Their small size allows for easier access to confined surgical sites, minimizing trauma and improving patient outcomes. The precise control offered by these actuators is crucial for delicate operations requiring intricate movements.
Micro-Assembly and Handling: Precise Manipulation of Small Parts
In micro-assembly and handling applications, micro linear actuators facilitate the precise manipulation of tiny components. Their high precision and repeatability are crucial for assembling intricate devices such as microelectronics, MEMS (Microelectromechanical Systems), and other miniature components. This precise control ensures the accuracy and reliability of the assembly process.
Haptic Devices: Providing Tactile Feedback
Haptic devices use micro linear actuators to provide users with tactile feedback, simulating the sensation of touch. This is crucial in applications such as virtual reality (VR) and teleoperation, where realistic interaction with virtual or remote environments is essential. The precise control of force and displacement allows for realistic and responsive tactile feedback.
Micro-Robotics: Enabling Advanced Functionality in Small Robots
Micro-robotics relies heavily on micro linear actuators to provide the necessary movement and control in extremely small robots. These miniature robots find application in areas like environmental monitoring, minimally invasive surgery, and exploration of confined spaces. The compact size and power efficiency are particularly important in these applications.
Choosing the Right Micro Linear Actuator
Selecting the appropriate micro linear actuator requires careful consideration of various factors. The specific needs of the robotic application dictate the most suitable choice. A thorough understanding of the required force, stroke length, speed, and precision is crucial.
Matching Actuator Specifications to Application Needs
The process involves comparing the specifications of available actuators with the requirements of the robotic system. This includes assessing the load capacity, operational speed, and power consumption. It’s vital to ensure that the chosen actuator can reliably perform its function within the given constraints.
Considering Environmental Factors
Environmental factors, such as temperature, humidity, and vibration, can significantly impact the performance and lifespan of a micro linear actuator. It’s essential to choose an actuator that can withstand the anticipated environmental conditions. This may involve selecting an actuator with specific protective coatings or seals.
Evaluating Cost and Availability
Cost is always a factor, particularly in large-scale projects. The price of different micro linear actuators can vary considerably depending on the technology, specifications, and manufacturer. Availability is also a key consideration, ensuring that the chosen actuator can be readily sourced and integrated into the robotic system.
Future Trends in Micro Linear Actuator Technology
The field of micro linear actuator technology is constantly evolving, with ongoing research and development focused on improving performance and expanding applications. Several trends are shaping the future of this critical component.
Increased Miniaturization and Integration
The trend towards smaller and more integrated devices is driving the development of even smaller and more compact micro linear actuators. This involves exploring new materials and manufacturing techniques to achieve higher performance in increasingly smaller packages.
Improved Efficiency and Power Management
Efforts are focused on improving the energy efficiency of micro linear actuators, reducing power consumption and extending operational time, particularly crucial for battery-powered robots. This involves optimizing the actuator design and incorporating advanced power management techniques.
Enhanced Precision and Control
Research is continuously advancing the precision and controllability of micro linear actuators. This includes developing more sophisticated control algorithms and integrating sensors for improved feedback and accuracy. The goal is to achieve even finer control and more repeatable movements.
Author

Related Posts

The Best Terraria Mods: A Comprehensive Guide
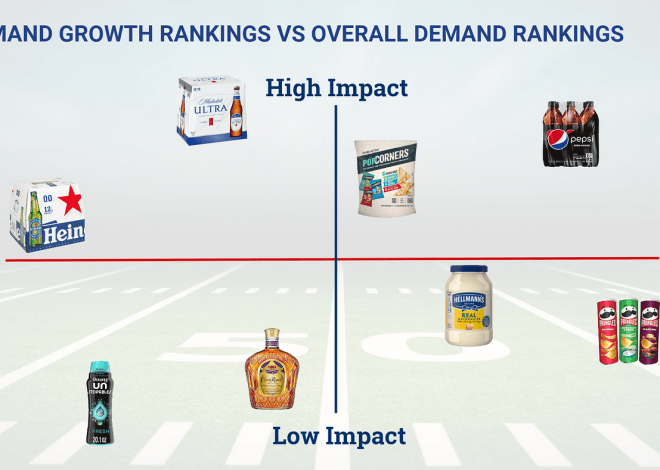
Super Bowl LVII Commercial Rankings